网站维护的方法seo网址
接口
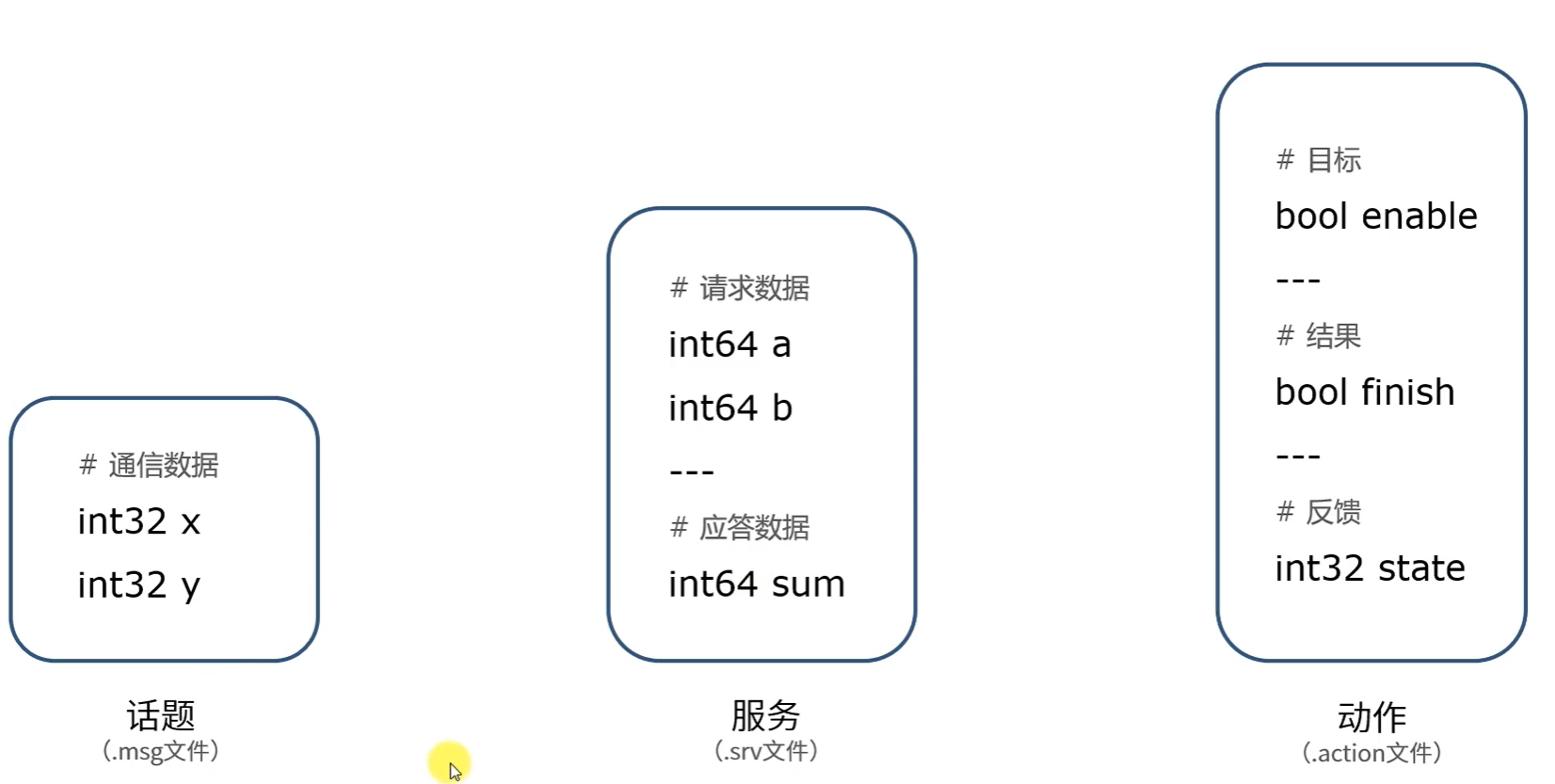
通信双方统一规定好接口。比如图像 img,控制运动的线速度和角速度……
我们也不用了解具体实现,基本就是了解接口会去用就行。
$ ros2 interface list # 展示所有 interfaces
$ ros2 interface show ... # 显示具体一个 interface
$ ros2 package show ... # 查看一个 package 里所有的 interface
添加接口
不是说我们写一个接口文件就算添加好了,我们也要通过读取文件。
在 CMakeList.txt 中可以看到:
rosidl_generate_interfaces(${PROJECT_NAME}"msg/ObjectPosition.msg""srv/AddTwoInts.srv""srv/GetObjectPosition.srv""action/MoveCircle.action")
指从相应的相对目录文件中找接口。
在文件中使用对应接口时,则需要先引入:
from File_Path import interface_name
这个引入文件的路径位于系统生成的 .py 文件中,编译成功即生成。
后面创建对象的时候就可以使用接口了。
动作
比如想让小乌龟转一圈,我们需要不停发送指令,根据当前状态调整指令,在一定条件时取消指令。使用动作比这样一点点写服务方便得多。
实际使用的时候我们也很少直接用话题和服务,都是用封装好的动作接口。
动作就是可以一边发运动指令,一边收到反馈信息。
实现方法还是基于话题和服务,话题是服务端(比如要控制运动的机器人)周期性反馈当前状态,服务是客户端给服务端发的指令请求。
比如打开小乌龟,打开键盘控制后,我们可以尝试发送如下指令:
$ ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 3.14}"
$ ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 0}" --feedback
在接口中可以看到动作接口的三部分:发起动作的目标,动作完成的结束标志,动作的反馈状态。
添加动作
前面的步骤和添加接口一样,编写对应 .action 文件,在 CMakeList.txt 中添加。
服务端:在程序里注意如何添加 action_server:
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from rclpy.action import ActionServer # ROS2 动作服务器类
from learning_interface.action import MoveCircle # 自定义的圆周运动接口class MoveCircleActionServer(Node):def __init__(self, name):super().__init__(name) # ROS2节点父类初始化self._action_server = ActionServer( # 创建动作服务器(接口类型、动作名、回调函数)self,MoveCircle,'move_circle',self.execute_callback)def execute_callback(self, goal_handle): # 执行收到动作目标之后的处理函数self.get_logger().info('Moving circle...')feedback_msg = MoveCircle.Feedback() # 创建一个动作反馈信息的消息for i in range(0, 360, 30): # 从0到360度,执行圆周运动,并周期反馈信息feedback_msg.state = i # 创建反馈信息,表示当前执行到的角度self.get_logger().info('Publishing feedback: %d' % feedback_msg.state)goal_handle.publish_feedback(feedback_msg) # 发布反馈信息time.sleep(0.5)goal_handle.succeed() # 动作执行成功result = MoveCircle.Result() # 创建结果消息result.finish = True return result # 反馈最终动作执行的结果def main(args=None): # ROS2节点主入口main函数rclpy.init(args=args) # ROS2 Python接口初始化node = MoveCircleActionServer("action_move_server") # 创建ROS2节点对象并进行初始化rclpy.spin(node) # 循环等待ROS2退出node.destroy_node() # 销毁节点对象rclpy.shutdown() # 关闭ROS2 Python接口
反馈函数每30度标记一次发布反馈信息。
客户端:先启动,然后发送动作请求并注册自己的回调函数、收到目标后的回调函数。
from rclpy.action import ActionClient # ROS2 动作客户端类from learning_interface.action import MoveCircle # 自定义的圆周运动接口class MoveCircleActionClient(Node):def __init__(self, name):super().__init__(name) # ROS2节点父类初始化self._action_client = ActionClient( # 创建动作客户端(接口类型、动作名)self, MoveCircle, 'move_circle') def send_goal(self, enable): # 创建一个发送动作目标的函数goal_msg = MoveCircle.Goal() # 创建一个动作目标的消息goal_msg.enable = enable # 设置动作目标为使能,希望机器人开始运动self._action_client.wait_for_server() # 等待动作的服务器端启动self._send_goal_future = self._action_client.send_goal_async( # 异步方式发送动作的目标goal_msg, # 动作目标feedback_callback=self.feedback_callback) # 处理周期反馈消息的回调函数self._send_goal_future.add_done_callback(self.goal_response_callback) # 设置一个服务器收到目标之后反馈时的回调函数def goal_response_callback(self, future): # 创建一个服务器收到目标之后反馈时的回调函数goal_handle = future.result() # 接收动作的结果if not goal_handle.accepted: # 如果动作被拒绝执行self.get_logger().info('Goal rejected :(')returnself.get_logger().info('Goal accepted :)') # 动作被顺利执行self._get_result_future = goal_handle.get_result_async() # 异步获取动作最终执行的结果反馈self._get_result_future.add_done_callback(self.get_result_callback) # 设置一个收到最终结果的回调函数 def get_result_callback(self, future): # 创建一个收到最终结果的回调函数result = future.result().result # 读取动作执行的结果self.get_logger().info('Result: {%d}' % result.finish) # 日志输出执行结果def feedback_callback(self, feedback_msg): # 创建处理周期反馈消息的回调函数feedback = feedback_msg.feedback # 读取反馈的数据self.get_logger().info('Received feedback: {%d}' % feedback.state) def main(args=None): # ROS2节点主入口main函数rclpy.init(args=args) # ROS2 Python接口初始化node = MoveCircleActionClient("action_move_client") # 创建ROS2节点对象并进行初始化node.send_goal(True) # 发送动作目标rclpy.spin(node) # 循环等待ROS2退出node.destroy_node() # 销毁节点对象rclpy.shutdown() # 关闭ROS2 Python接口发送动作请求成功了,服务器端先发一个应答反馈,触发的是 goal_response_callback 中的 ‘Goal accepted 😃’ ,后续收到反馈信息是输出 (‘Received feedback: {%d}’ .
$ ros2 run learning_action action_move_server
[INFO] [1692636260.811751032] [action_move_server]: Moving circle...
[INFO] [1692636260.812184742] [action_move_server]: Publishing feedback: 0
[INFO] [1692636261.313871989] [action_move_server]: Publishing feedback: 30
[INFO] [1692636261.817491663] [action_move_server]: Publishing feedback: 60
[INFO] [1692636262.319652946] [action_move_server]: Publishing feedback: 90
[INFO] [1692636262.822605205] [action_move_server]: Publishing feedback: 120
[INFO] [1692636263.325196016] [action_move_server]: Publishing feedback: 150
[INFO] [1692636263.826669745] [action_move_server]: Publishing feedback: 180
[INFO] [1692636264.328210660] [action_move_server]: Publishing feedback: 210
[INFO] [1692636264.829900461] [action_move_server]: Publishing feedback: 240
[INFO] [1692636265.331746904] [action_move_server]: Publishing feedback: 270
[INFO] [1692636265.833479902] [action_move_server]: Publishing feedback: 300
[INFO] [1692636266.335957841] [action_move_server]: Publishing feedback: 330$ ros2 run learning_action action_move_client
[INFO] [1692636260.807239104] [action_move_client]: Goal accepted :)
[INFO] [1692636260.815466218] [action_move_client]: Received feedback: {0}
[INFO] [1692636261.315441690] [action_move_client]: Received feedback: {30}
[INFO] [1692636261.820438299] [action_move_client]: Received feedback: {60}
[INFO] [1692636262.320808661] [action_move_client]: Received feedback: {90}
[INFO] [1692636262.827049792] [action_move_client]: Received feedback: {120}
[INFO] [1692636263.326864092] [action_move_client]: Received feedback: {150}
[INFO] [1692636263.827891348] [action_move_client]: Received feedback: {180}
[INFO] [1692636264.332103011] [action_move_client]: Received feedback: {210}
[INFO] [1692636264.831075874] [action_move_client]: Received feedback: {240}
[INFO] [1692636265.332972986] [action_move_client]: Received feedback: {270}
[INFO] [1692636265.834606029] [action_move_client]: Received feedback: {300}
[INFO] [1692636266.337943178] [action_move_client]: Received feedback: {330}
[INFO] [1692636266.848281638] [action_move_client]: Result: {1}